Robô cheirador mostra o quanto é difícil imitar um urubu
Redação do Site Inovação Tecnológica -
28/05/2019
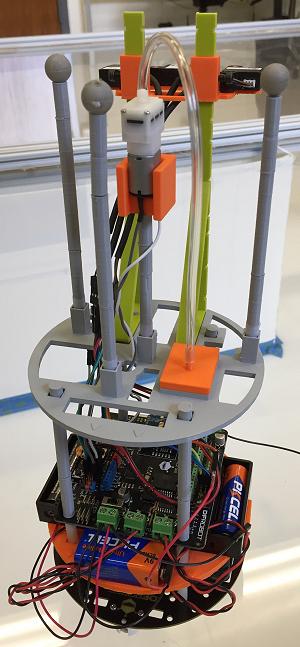
O robô tornou-se capaz de detectar a fonte de vazamento de etanol de
forma muito eficiente e rápida. [Imagem: Reza Khodayi-mehr]

Nariz de robô
A ciência está longe de compreender totalmente o olfato, mas narizes eletrônicos têm tentado imitar esse sentido natural porque ele é extremamente útil, da indústria de perfumes e alimentos até a detecção de poluentes do ar e substâncias tóxicas.
Pesquisadores da Universidade Duke, nos EUA, estavam justamente tentando aprimorar o nariz eletrônico criado pela equipe para dotar um robô da capacidade de detectar a fonte de origem da emissão de poluentes e vazamentos tóxicos.
Eles rapidamente descobriram que não é suficiente mandar o robô "seguir seu nariz".
Além disso, embora aves como urubus e abutres possam encontrar sua fonte de alimento a dezenas de quilômetros de distância, a imitação da natureza ainda não produz bons frutos justamente porque não entendemos direito o olfato.
"Muitas abordagens existentes que empregam robôs para localizar fontes de partículas transportadas pelo ar baseiam-se em suposições bioinspiradas, mas simplistas, ou em técnicas heurísticas, que dirigem os robôs contra o vento ou seguem concentrações crescentes. Esses métodos geralmente só podem localizar uma única fonte em espaço aberto e não podem estimar outros parâmetros igualmente importantes, como as taxas de liberação," explica o professor Michael Zavlanos.
Física dos fluxos de ar e rota otimizada
Em ambientes complexos, os métodos atuais podem levar os robôs para áreas onde as concentrações calham de serem maiores pela física dos fluxos de ar, e não porque são a fonte do vazamento.
A equipe encontrou a solução justamente analisando esses fluxos de ar em tempo real, o que permitiu rastrear a fonte de uma emissão com mais eficiência.
O robô faz uma medição de concentração do composto em questão, combina-o com as medições anteriores e resolve um problema de otimização para estimar a probabilidade da localização da fonte de emissão. Em seguida, ele calcula o local mais promissor para testar essa probabilidade e vai até lá realizar a próxima medição, repetindo o processo até que a fonte seja encontrada.
"Combinando modelos baseados em física com um planejamento otimizado da rota podemos descobrir onde a fonte está com muito poucas medições," disse Zavlanos. "Isso ocorre porque os modelos baseados em física fornecem correlações entre medições que não são levadas em conta por abordagens puramente orientadas a dados, e o planejamento otimizado da rota permite que o robô selecione essas poucas medições com o maior conteúdo de informações."
O grupo já está trabalhando para criar algoritmos de aprendizado de máquina para tornar seus modelos ainda mais eficientes e precisos ao mesmo tempo. Eles também estão trabalhando para estender essa ideia à programação de uma frota de robôs para realizar uma pesquisa metódica de uma grande área. Embora ainda não tenha testado a abordagem de enxame robótico na prática, a equipe publicou simulações que demonstram seu potencial.
Bibliografia:
Model-Based Active Source Identification in Complex Environments
Reza Khodayi-mehr, Wilkins Aquino, Michael M. Zavlanos
IEEE Transactions on Robotics
DOI: 10.1109/TRO.2019.2894039
https://arxiv.org/abs/1706.01603
Nenhum comentário:
Postar um comentário